

UAV撮影コースを設計する機能
【2022/10/26】

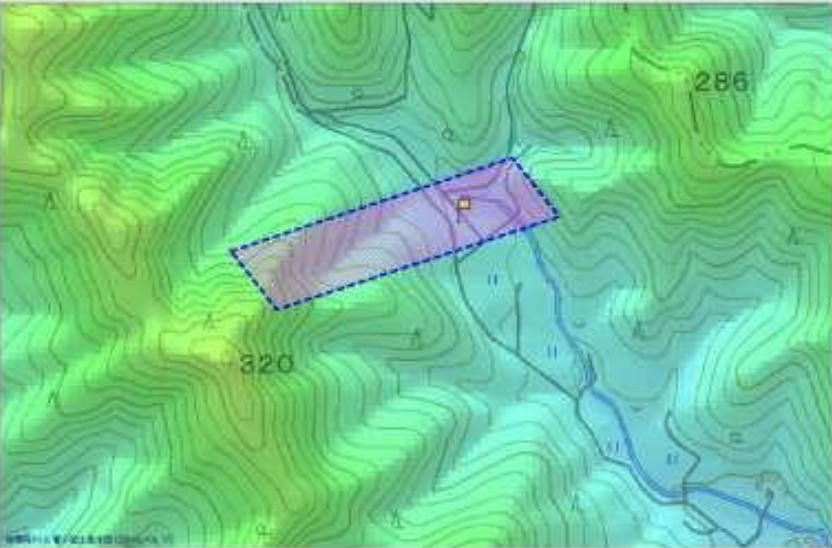
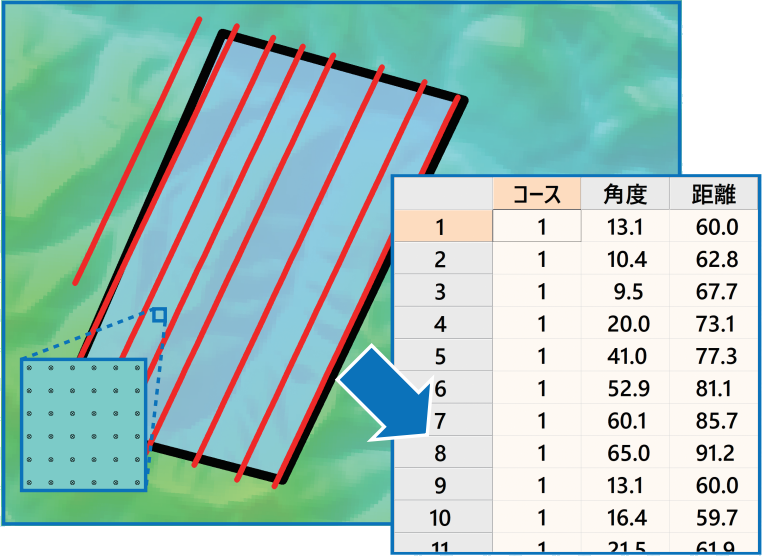
設計コース例 ※背景に「地理院地図(写真)」を表示させています。
UAVを用いた測量業務において、国土地理院「公共測量におけるUAVの使用に関する安全基準(案)」などの法が整備されました。
UAVを利用して地表面を撮影する場合、カメラの性能や地形条件、求められる成果品の品質等、考慮しなければならない事項が沢山あります。そのため撮影を継続的に行う場合には、撮影毎に条件を指定し、条件に合ったコースを設計することが必要です。
PC-MAPPINGでは、主にUAVによる空中写真測量・レーザー測量業務に向けた「UAV飛行計画コース設計」機能を標準機能でご提供しております。
UAVを利用して地表面を撮影する場合、カメラの性能や地形条件、求められる成果品の品質等、考慮しなければならない事項が沢山あります。そのため撮影を継続的に行う場合には、撮影毎に条件を指定し、条件に合ったコースを設計することが必要です。
PC-MAPPINGでは、主にUAVによる空中写真測量・レーザー測量業務に向けた「UAV飛行計画コース設計」機能を標準機能でご提供しております。
PC-MAPPINGのUAV(ドローン)コース設計 3つの特徴
①充実の基本機能で安心・快適なコース設計
UAV(ドローン)を飛行させるにあたり、コース設計は重要です。
特に自動操縦の場合は、コース設計によって得られる成果が大きく変わることもあります。
PC-MAPPINGでは、「カメラ撮影」「レーザースキャナ」の2種類のコース設計メニューから、地形、高度、カメラ諸元、撮影範囲等の撮影条件を元に、自動でUAVの飛行コースを設計できます。
作成されたコースデータは画面上で確認でき、3Dビューでの表示も可能です。
出力形式は、KML、CSV、AWMに対応しています。
[ツール]-[UAVコース設計]-[UAV撮影コース設計(カメラ撮影)]
[ツール]-[UAVコース設計]-[UAV撮影コース設計(レーザースキャナー)]
特に自動操縦の場合は、コース設計によって得られる成果が大きく変わることもあります。
PC-MAPPINGでは、「カメラ撮影」「レーザースキャナ」の2種類のコース設計メニューから、地形、高度、カメラ諸元、撮影範囲等の撮影条件を元に、自動でUAVの飛行コースを設計できます。
作成されたコースデータは画面上で確認でき、3Dビューでの表示も可能です。
出力形式は、KML、CSV、AWMに対応しています。
[ツール]-[UAVコース設計]-[UAV撮影コース設計(カメラ撮影)]
[ツール]-[UAVコース設計]-[UAV撮影コース設計(レーザースキャナー)]
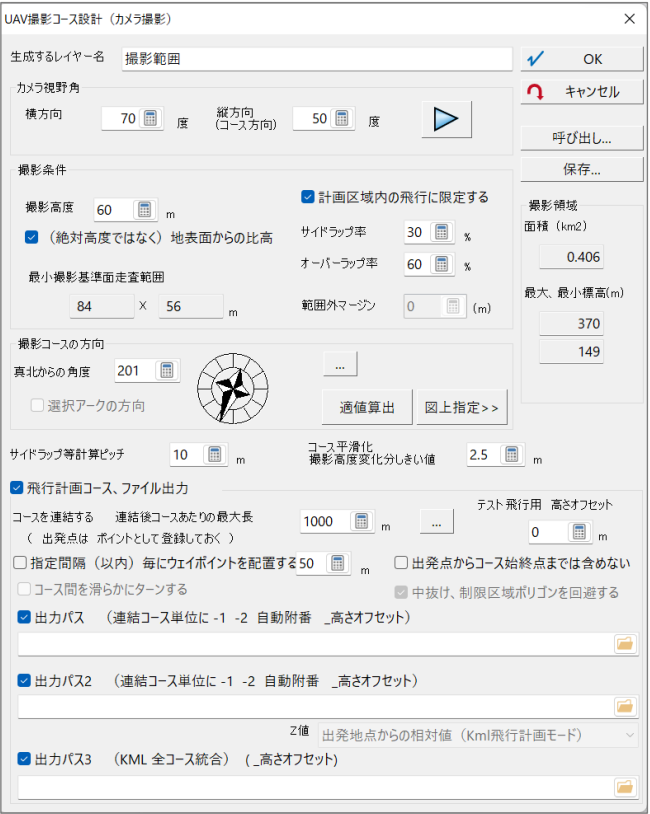
設定ダイアログ:カメラ撮影
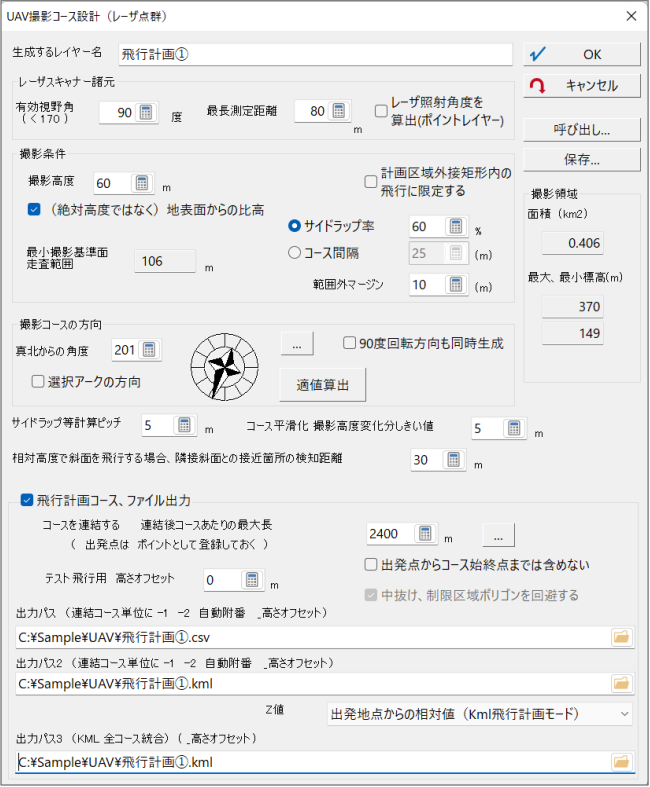
設定ダイアログ:レーザースキャナ
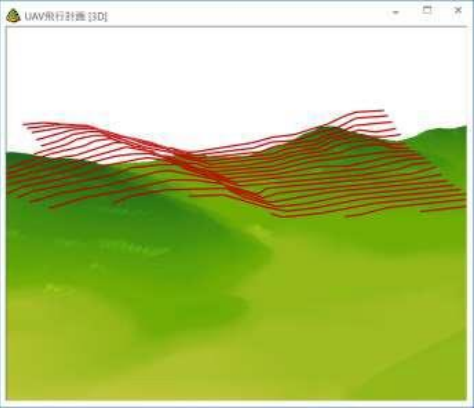
作成したコースを3Dビュー上で確認
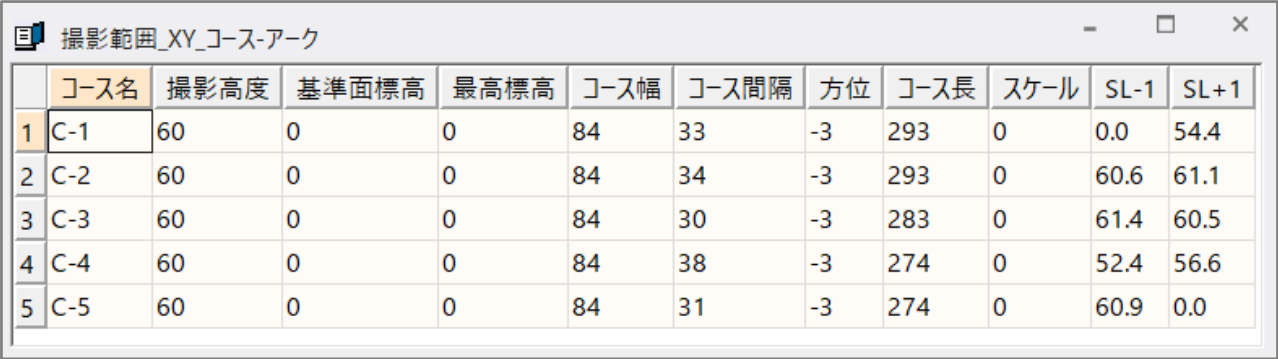
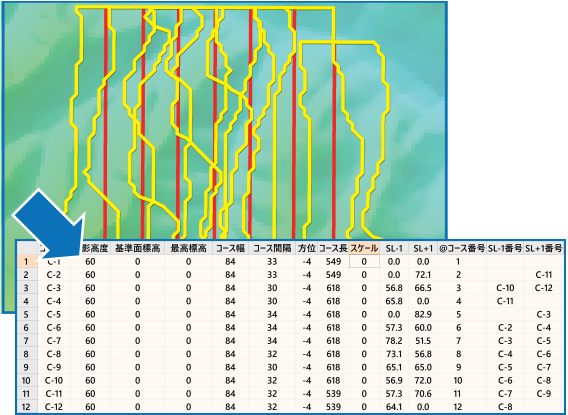
コースに設定される属性データ例
②オーバーラップ率・サイドラップ率を充足するコース設計
UAV(ドローン)を利用した地表面の撮影を測量業務として実施する場合、品質を保つために規定のオーバーラップ率(同一撮影コースの前後の撮影範囲との重複率)・サイドラップ率(隣接コースの撮影範囲との重複率)を満たす必要があります。
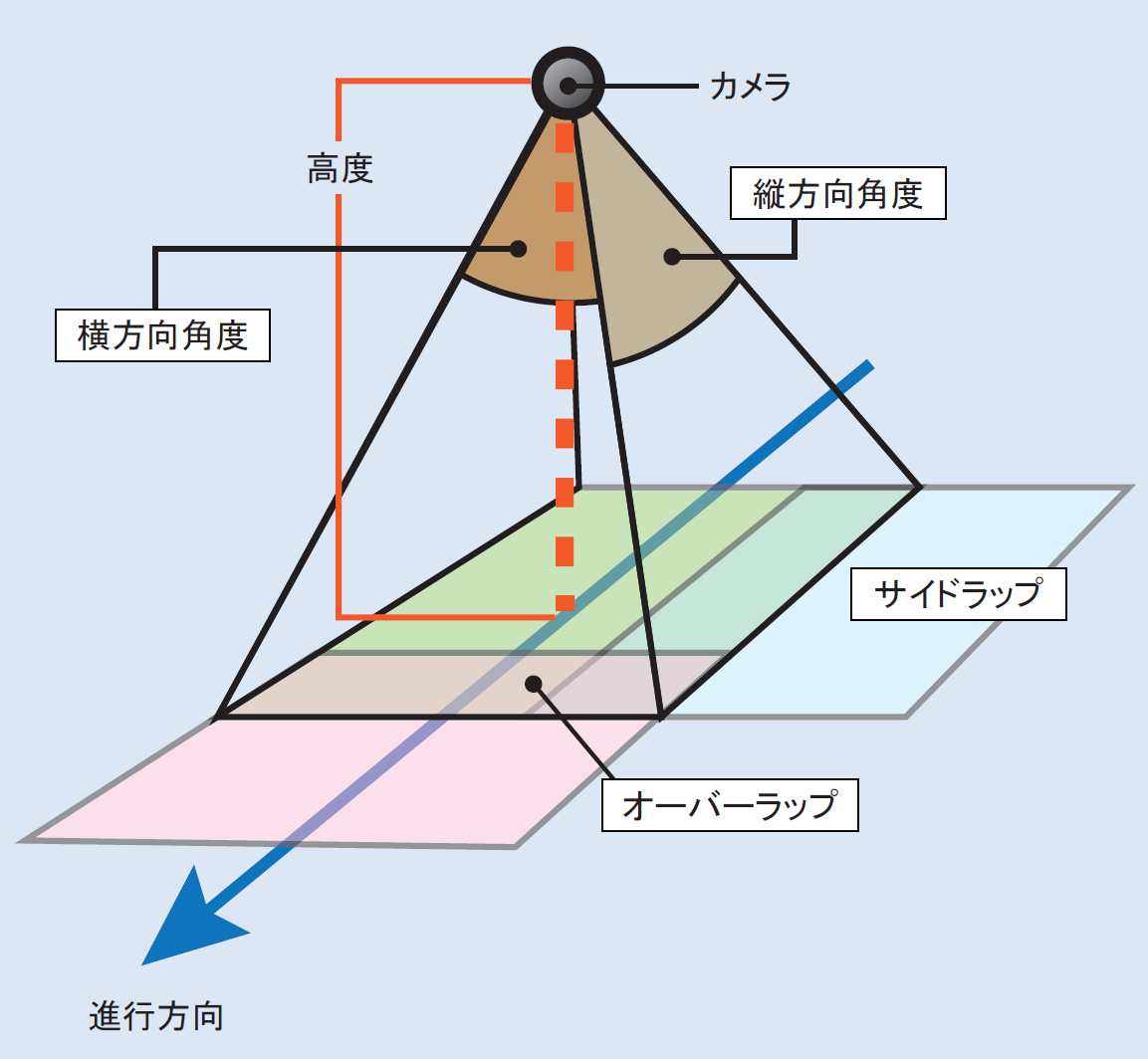
PC-MAPPINGのUAV撮影コース設計機能では、必要なオーバーラップ率・サイドラップ率をパラメーターとして設定することにより、規定のラップ率を満たしたコース設計を行うことができます。
また、設計コースから算出されたラップ率の情報は、属性情報として登録されます。
また、設計コースから算出されたラップ率の情報は、属性情報として登録されます。
③地形による影響を考慮
UAV(ドローン)は、航空機等と比べて低高度で飛行するため、地形の影響を強く受けます。そのため、地形データを考慮した適切なコース設計を行うことで、より高品質・高精度な撮影成果を得られます。
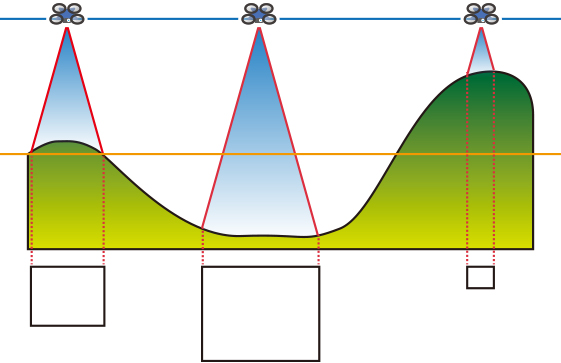
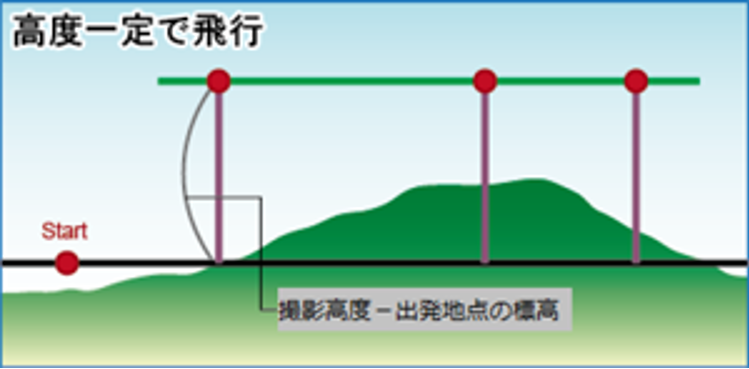
左図は、UAVで起伏のある地形を高度一定で飛行した際の、撮影ポイントによる撮影範囲の変動を示したものです。
撮影範囲は、対地高度およびカメラの焦点距離から算出されるため、標高が高くドローンと地面の距離が近い地点ほど、撮影範囲は狭くなります。
低高度を飛行するドローンの場合、このような地形による撮影範囲の変動を考慮しないと、実際の成果品は規定のラップ率を満たさない可能性があります。
撮影範囲は、対地高度およびカメラの焦点距離から算出されるため、標高が高くドローンと地面の距離が近い地点ほど、撮影範囲は狭くなります。
低高度を飛行するドローンの場合、このような地形による撮影範囲の変動を考慮しないと、実際の成果品は規定のラップ率を満たさない可能性があります。
このような背景から、PC-MAPPINGでは地形を考慮したコース設計を基本とし、標高メッシュデータを利用しています。
標高メッシュデータには、CSV、TIFF等の一般的な形式のデータをインポート可能なほか、地理院地図の標高タイルを取り込んで利用することもできます。
標高データの解析は、オーバーラップ率では撮影ポイント毎、サイドラップ率では指定した計算ピッチ毎に行います。
撮影基準面高度のみを指定する場合と比較して、より地形の影響を反映したコース設計が可能となります。
標高メッシュデータには、CSV、TIFF等の一般的な形式のデータをインポート可能なほか、地理院地図の標高タイルを取り込んで利用することもできます。
標高データの解析は、オーバーラップ率では撮影ポイント毎、サイドラップ率では指定した計算ピッチ毎に行います。
撮影基準面高度のみを指定する場合と比較して、より地形の影響を反映したコース設計が可能となります。
撮影範囲の背景に標高メッシュ(グラデーションカラー)を表示
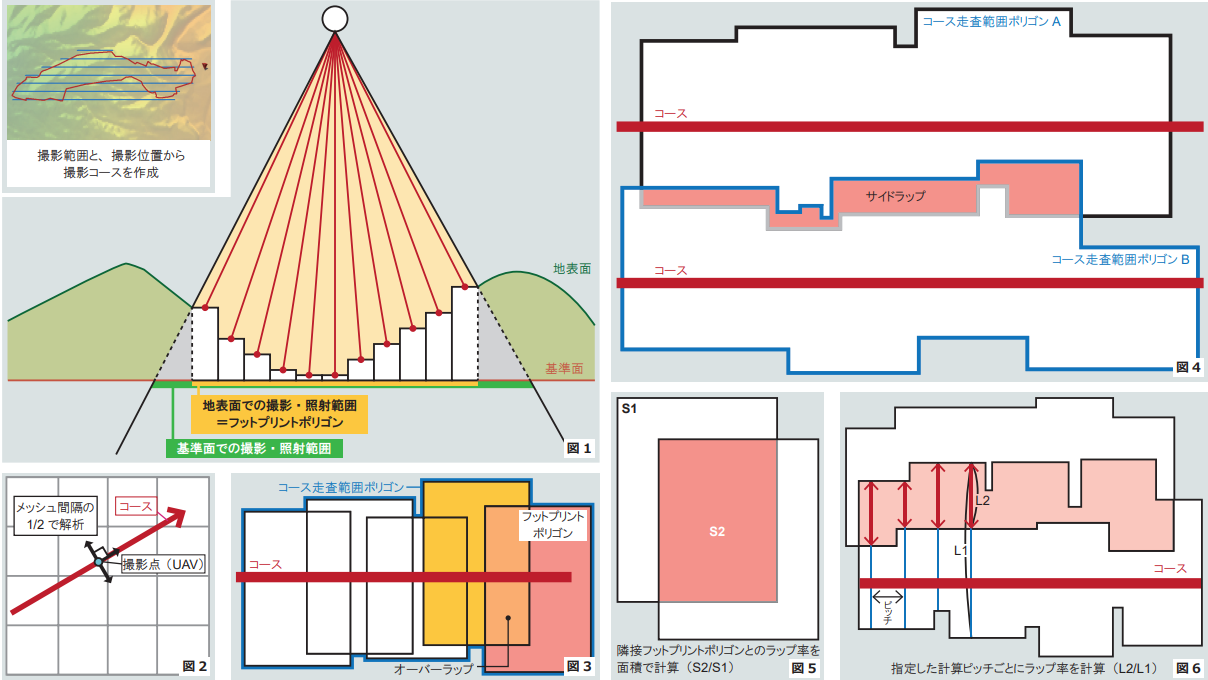
標高データ解析とオーバーラップ・サイドラップ率計算の仕組み
※画像クリックで拡大表示されます。
高度なコース設計を行うための補助機能
「UAV飛行計画コース設計」機能には、現場の声を元にしたより高度なコース設計を可能にする補助機能が備わっています。
ここではその一例をご紹介します。
ここではその一例をご紹介します。
飛行コースのふらつきを抑制/速やかにコースに復帰する
UAV(ドローン)は、機体の重量が軽いことから、風等の影響を受けやすいことが知られています。
そのような外的要因を考慮して、UAVのふらつきを抑制したり、飛行中にコースから外れてしまった場合でも速やかに戻れるようなコース設計上の工夫が必要となります。
「ターンを滑らかに調整」機能では、次のコースに向けてUAVが旋回する箇所を角が取れた滑らかなコースに自動調整することで、旋回時の機体のふらつきを抑制します。
「一定間隔のWaypoint追加」機能では、UAVの自動操縦におけるチェックポイントとなるWaypointを一定間隔で自動追加することで、UAVがコースに沿って飛行しやすくなります。
そのような外的要因を考慮して、UAVのふらつきを抑制したり、飛行中にコースから外れてしまった場合でも速やかに戻れるようなコース設計上の工夫が必要となります。
「ターンを滑らかに調整」機能では、次のコースに向けてUAVが旋回する箇所を角が取れた滑らかなコースに自動調整することで、旋回時の機体のふらつきを抑制します。
「一定間隔のWaypoint追加」機能では、UAVの自動操縦におけるチェックポイントとなるWaypointを一定間隔で自動追加することで、UAVがコースに沿って飛行しやすくなります。
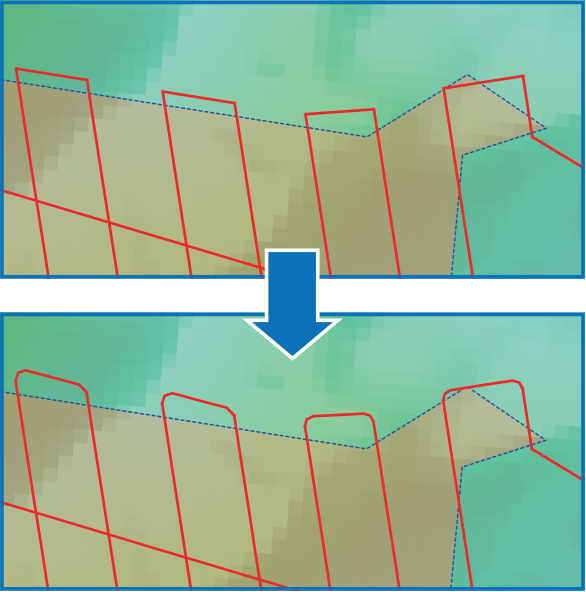
ターンを滑らかに調整
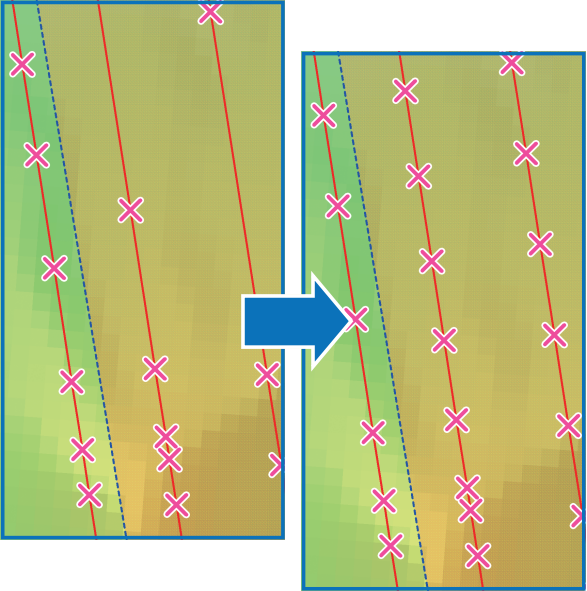
一定間隔のWaypoint追加
飛行制限エリアを回避/計画区域内のみで飛行するコースの設計
UAV(ドローン)を飛行させる場合は、空港の周辺や人口集中地区の上空等、飛行制限区域を考慮に入れたコース設計が必要となります。また、飛行制限区域に該当しない場合でも、低高度で安全に飛行させる場合には周囲よりも高い建造物のある区域等を事前に飛行区域から除外しておく等の配慮が必要となります。
「中抜け、制限領域ポリゴンを回避する」機能では、事前に設定した飛行制限区域を避けるコースの設計が可能です。
「計画区域内の飛行に限定する」機能では、設定した撮影エリアからは外に出ないコースを設計することができます。
「中抜け、制限領域ポリゴンを回避する」機能では、事前に設定した飛行制限区域を避けるコースの設計が可能です。
「計画区域内の飛行に限定する」機能では、設定した撮影エリアからは外に出ないコースを設計することができます。
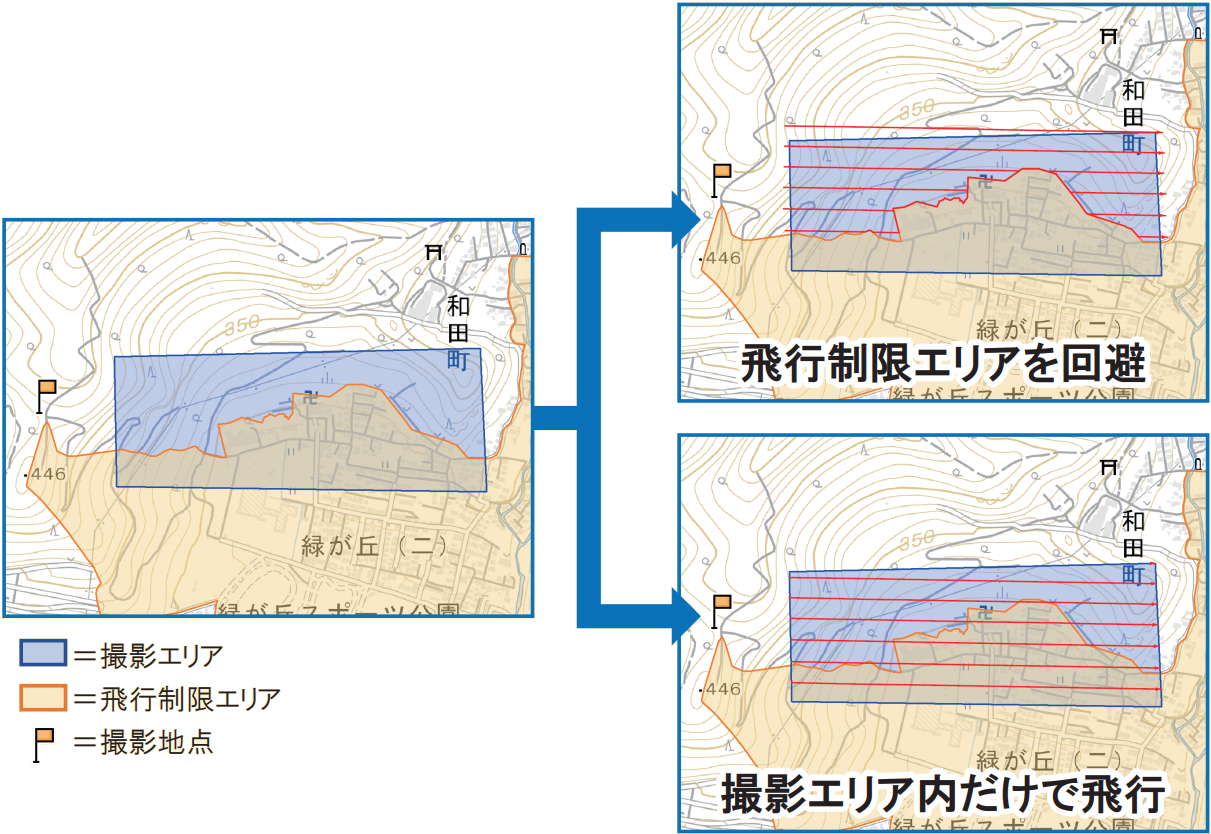
※背景に「地理院地図(淡色)」を表示させています。
地形に沿ったコースの設計
飛行高度の設定は、「地形に沿うように飛行」「高度一定で飛行」の2種類から選択することができます。
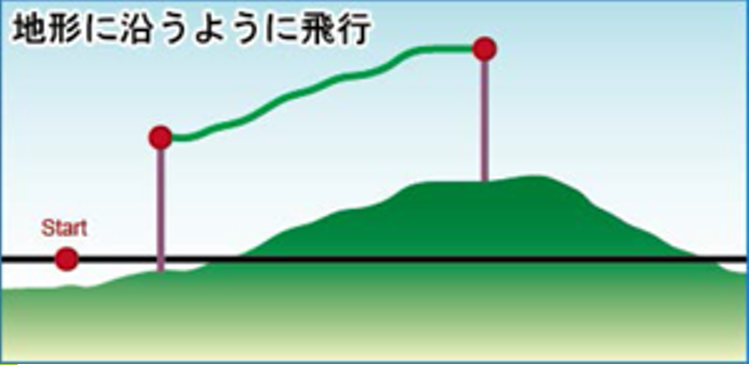
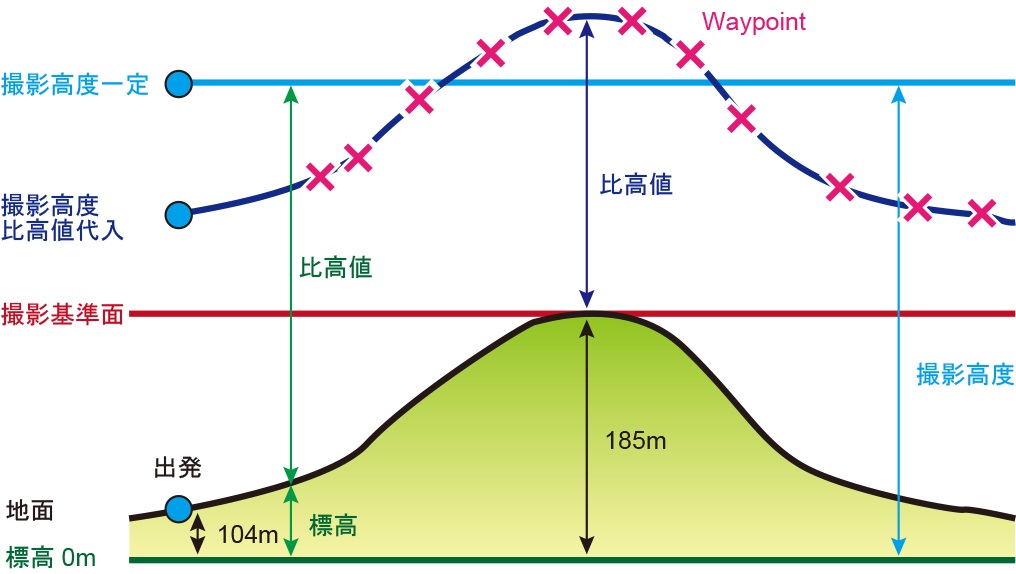
「地形に沿うように飛行」の場合、UAV(ドローン)の飛行中に高度の変化が伴います。UAVにとって飛行高度の変化はバッテリーへの負荷を伴うため、できるだけ効率的なWaypointの配置が求められます。
「コース平滑化 撮影高度変化分しきい値」を設定すると、設定した値以上の高度変化があった場合にのみWaypointを作成します。Waypoint数を適切な数に抑制することで、負荷の少ないコース設計を実現します。
「コース平滑化 撮影高度変化分しきい値」を設定すると、設定した値以上の高度変化があった場合にのみWaypointを作成します。Waypoint数を適切な数に抑制することで、負荷の少ないコース設計を実現します。
また、UAVを地形に沿って飛行させる場合、飛行高度が十分でも傾斜によっては斜面からの距離が近くなり、樹木等の障害物への衝突の危険がある箇所が発生する可能性があります。
このような事情から、設計したコースにつき斜面からの距離が設定値を下回る(斜面に近接している)箇所を検出する機能を設けています。
このような事情から、設計したコースにつき斜面からの距離が設定値を下回る(斜面に近接している)箇所を検出する機能を設けています。
豊富なオプション機能を搭載
UAV(ドローン)コース設計に関連する各種オプション機能を標準機能として備えています。
設計されたコースの編集・調整や評価、再出力等さまざまな用途にご利用頂けます。
設計されたコースの編集・調整や評価、再出力等さまざまな用途にご利用頂けます。
サイドラップ等再計算
既に作成されたコースのサイドラップ率等を再計算します。
8の字型飛行コース作成
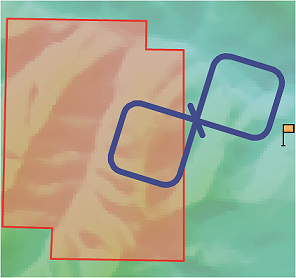
IMUキャリブレーションに利用される8の字型飛行コースを作成します。
レーザー点群密度推定
設定条件でのレーザースキャナによるレーザー照射位置にポイントデータを作成し、照射角度・距離を算出します。

その他のオプション機能
- 計画コース 調整・出力
- 計画コース 横断解析
- 計画コース 反転 等
本機能の動作要件・操作方法等の詳細情報は下記PDFドキュメントでも公開しています。
UAV飛行計画コース設計手順書(PDFが開きます。)
UAV飛行計画コース設計手順書(PDFが開きます。)