

ドローン(UAV)とPC-MAPPING
UAVを使った撮影が測量作業規定に盛り込まれ、本格的な利活用が見込まれます。
今後、規定に準拠した飛行ルートを得るには、標高も加味した精度の高いコース設計が求められます。
PC-MAPPINGでは、撮影諸条件を設定することで、撮影対象エリアの標高から撮影される範囲を計算し、最適なルート設計を行う機能を提供します。
今後、規定に準拠した飛行ルートを得るには、標高も加味した精度の高いコース設計が求められます。
PC-MAPPINGでは、撮影諸条件を設定することで、撮影対象エリアの標高から撮影される範囲を計算し、最適なルート設計を行う機能を提供します。
■機能の詳細はこちら
■UAV関係のTOPICSはこちら
撮影対象エリアをもれなく撮影
一般的にドローンは、低高度で飛行し、カメラ撮影やレーザースキャンを行います。
低い高度で飛行することで、撮影範囲や走査範囲は撮影対象エリアの標高差の影響を大きく受けます。
標高差の影響により1枚の撮影範囲が狭くなったり、1枚の写真のなかで撮影範囲に偏りが発生したり等、指定したオ-バーラップ率やサイドラップ率が担保されない危険性が生じます。
低い高度で飛行することで、撮影範囲や走査範囲は撮影対象エリアの標高差の影響を大きく受けます。
標高差の影響により1枚の撮影範囲が狭くなったり、1枚の写真のなかで撮影範囲に偏りが発生したり等、指定したオ-バーラップ率やサイドラップ率が担保されない危険性が生じます。
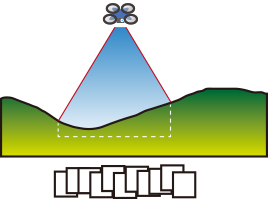
地表面の高低差が撮影範囲に影響する例
(1枚の撮影範囲において標高差が顕著)
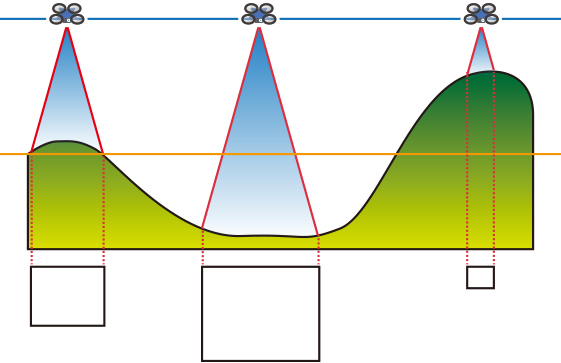
撮影面への標高差の影響
(同一コースにおいて標高差が顕著)
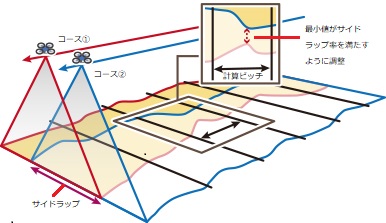
PC-MAPPINGでは、標高差を考慮して撮影コースを設計することで、オーバーラップやサイドラップを担保します。
また、災害時等の面的な調査が必要な場合において、隙間がない撮影結果を得ることができます。
これにより、再撮影のリスクを低減し撮影業務を支援します。
また、災害時等の面的な調査が必要な場合において、隙間がない撮影結果を得ることができます。
これにより、再撮影のリスクを低減し撮影業務を支援します。
地形に沿うように撮影コースを設計可能
地形に沿うように飛行することは、UAV(ドローン)を使用した撮影メリットの1つです。
例えば地表面を一定の解像度で確認ができ、調査や状況確認業務に適した飛行を可能にします。
例えば地表面を一定の解像度で確認ができ、調査や状況確認業務に適した飛行を可能にします。
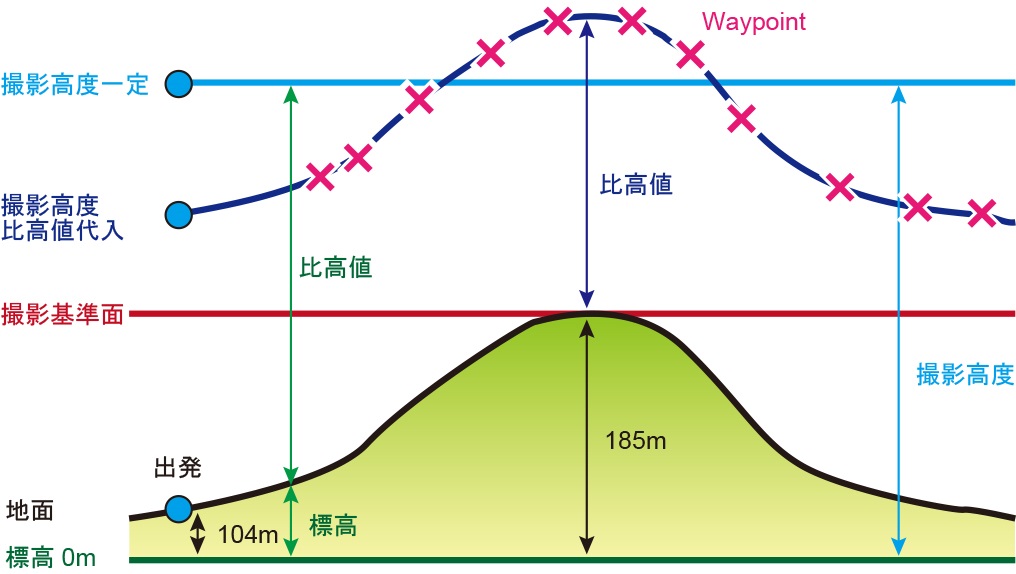
地面からの高さを一定(比高値)で飛行する場合、単純に (撮影位置の標高)+(撮影高度)で飛行するようにコースを設計すると、標高の変化点分のWayPointが作成されてしまいます。UAV(ドローン)にとって、高さの変化はバッテリーに大きな負荷がかかるため、飛行距離を短く設定しなければいけません。
PC-MAPPINGでは、標高に指定以上の変化があった場合にのみWayPointを作成することで、バッテリーへの負荷を低減したコース設計を行います。
PC-MAPPINGでは、標高に指定以上の変化があった場合にのみWayPointを作成することで、バッテリーへの負荷を低減したコース設計を行います。

ドローン(UAV)関連の業務は、今後も大きく進歩していくのではないかと思います。
「こういったことはできるの?」「こういう方法のほうが使いやすいよ!」というご意見を受け、ご紹介した機能は日々進化しております。
標準機能ですので、ご興味をお持ちいただいた方はぜひお試しください!
「こういったことはできるの?」「こういう方法のほうが使いやすいよ!」というご意見を受け、ご紹介した機能は日々進化しております。
標準機能ですので、ご興味をお持ちいただいた方はぜひお試しください!