

UAV飛行計画 飛行コースのふらつきを抑制する
今年もあと数日となりました。
マプコンでは、UAVを使用した業務を行っている企業様、研究をされている大学様のご協力の元、飛行コース設計機能の拡充を行っています。
今回は、その一中でいただいたご意見・アイディアを反映した機能をご紹介いたします。
マプコンでは、UAVを使用した業務を行っている企業様、研究をされている大学様のご協力の元、飛行コース設計機能の拡充を行っています。
今回は、その一中でいただいたご意見・アイディアを反映した機能をご紹介いたします。
↓↓これまでのお話はこちら↓↓
飛行コースのふらつきはなぜ起こる?その問題は?

皆様ご存知のとおり、ドローンは空を飛ぶ機械ですので、風の影響を大きく受けます。
ドローンの自動飛行機能では、あらかじめ設定されたWayPointの位置を通過するように動作します。
従来より飛行コース自動設計機能で作成されるコースの多くは、WayPointをコースの曲点にのみ作成しています。
そのため、1コースが100mある場合、WayPoint間の距離が100mとなります。この時にコースに対して横から風が吹くと、ドローンは風に流され、実際に飛行するコースでは大きく湾曲することがあります。
ドローンの自動飛行機能では、あらかじめ設定されたWayPointの位置を通過するように動作します。
従来より飛行コース自動設計機能で作成されるコースの多くは、WayPointをコースの曲点にのみ作成しています。
そのため、1コースが100mある場合、WayPoint間の距離が100mとなります。この時にコースに対して横から風が吹くと、ドローンは風に流され、実際に飛行するコースでは大きく湾曲することがあります。
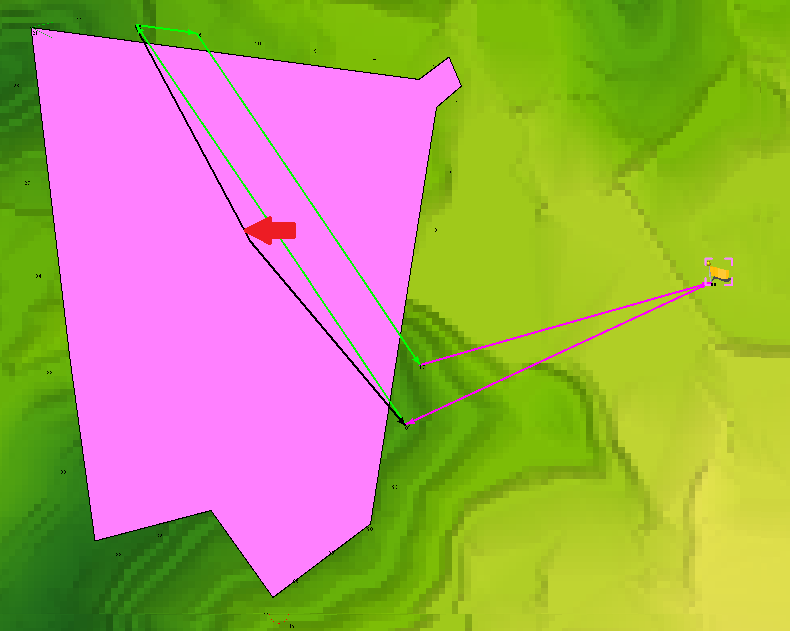
例えば、下図は黄色の旗印からドローンを飛ばしピンク色のエリアを飛行するために、黄緑のコースを自動設計したものです。
ピンク色のエリアを効率的に飛行する最短経路をコースとしていますが、コースの直線部分にはWayPointは1つもありません。
設計したコースは直線ですが、実際の飛行では横風やターン時の慣性があるためドローンは必ずしもコース上をまっすぐ飛ぶことができません。
しかし、ドローンはWayPointで指定された位置に辿り着くように飛行しますので、次のWayPointまで位置が補正されずに飛行することになります。
ピンク色のエリアを効率的に飛行する最短経路をコースとしていますが、コースの直線部分にはWayPointは1つもありません。
設計したコースは直線ですが、実際の飛行では横風やターン時の慣性があるためドローンは必ずしもコース上をまっすぐ飛ぶことができません。
しかし、ドローンはWayPointで指定された位置に辿り着くように飛行しますので、次のWayPointまで位置が補正されずに飛行することになります。
コースに上述のようなふらつきがあると、
- 写真撮影やレーザー計測のサイドラップ率が不安定になる⇒取得データの信頼性に関する問題
- 付近の障害物へ接触する可能性⇒飛行の安全性に関する問題
ふらつきを抑制するコース設計
上述の問題があるとしても、風をコントロールすることはできません。
そこでPC-MAPPINGでは、
WayPoint=ドローンの目的地と考え、飛行コースから外れてしまった場合にも、すぐに元の位置に戻ろうとするコース設計になります。
そこでPC-MAPPINGでは、
- 直線コースが長い場合に、一定間隔でWayPointを自動追加する
- ターンを滑らかにし、ターン時のふらつきの抑制を図る
WayPoint=ドローンの目的地と考え、飛行コースから外れてしまった場合にも、すぐに元の位置に戻ろうとするコース設計になります。
下図は設定画面とその飛行コース設計結果です。
赤色の×印が一定間隔で追加したWayPointと、コースを滑らかにターンするためのWayPointです。
赤色の×印が一定間隔で追加したWayPointと、コースを滑らかにターンするためのWayPointです。
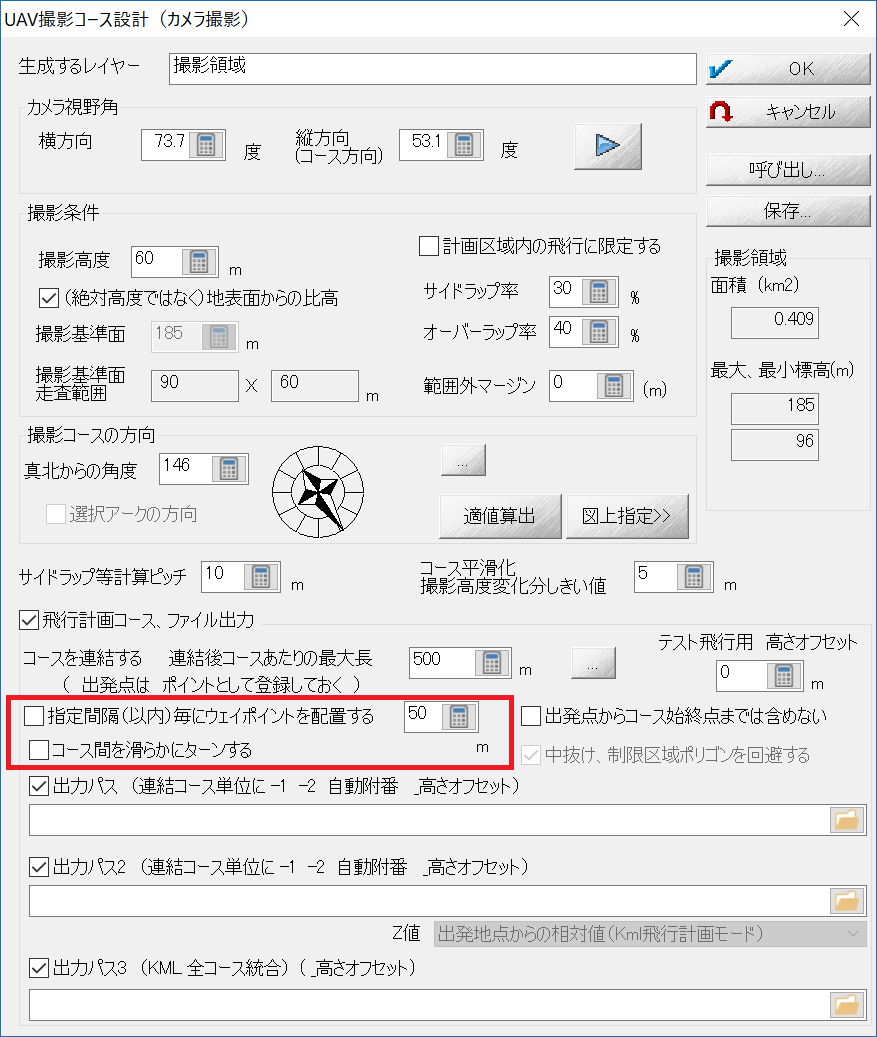
設定画面
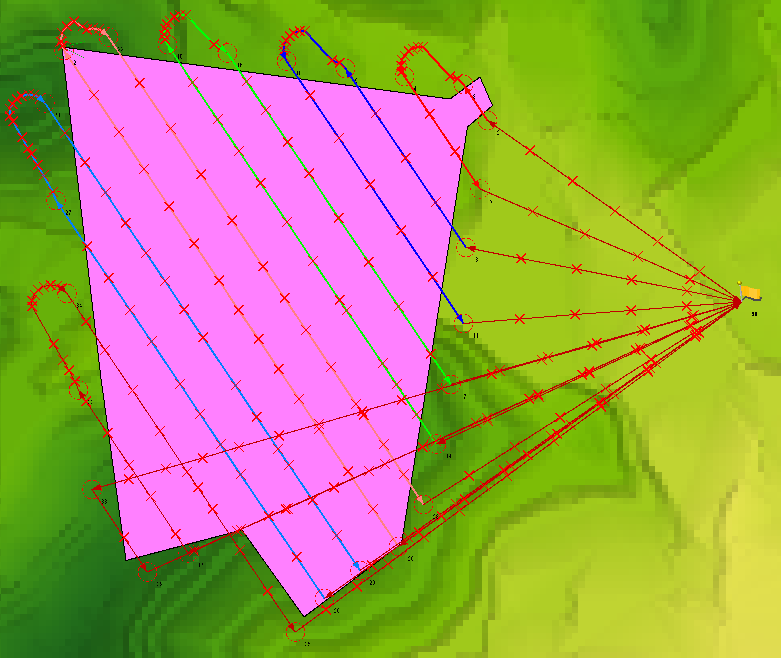
設計結果
WayPoint数が多すぎる場合は、追加する間隔を広げたり、不要なWayPointを削除してコントローラーに受け渡すことができます。